MSD_C25E100

Sản phẩm
Hỗ trợ trực tuyến
0983029530
-


Linh Trần
+84983029530
Thống kê truy cập
Đang Online : 2
Hôm nay : 61
Hôm qua : 72
Tổng truy cập : 219074
MSD_C25E100
6 Tháng




Tính Năng
- 1 Driver MSD_E3 (New)
- 1 Động cơ 24V, 25W (Used).
- Driver: 8-30VDC, 0-3A, 1-30W.
- Điều khiển vị trí, vận tốc, gia tốc.
- Công cụ tự động dò thông số PID.
- Bảo vệ quá dòng, quá nhiệt, ngắn mạch.
- Phát hiện Encoder hư, mất Phase động cơ.
- Bảo vệ khi sai số vượt ngưỡng cho phép.
- Hỗ trợ giao tiếp USB với app DcTurningPro
- Hỗ trợ COM ảo để giao tiếp với người dùng.
- Phương thức giao tiếp: Pulse/Dir, UART, USB, Analog (Velocity mode)
- Tích hợp các bộ điều khiển vòng kín: SmartPID, PID, PI, State feedback.
- Chế độ H-Bridge với các tính năng bảo vệ quá dòng, quá nhiệt.
Số lượng
Giới Thiêu:
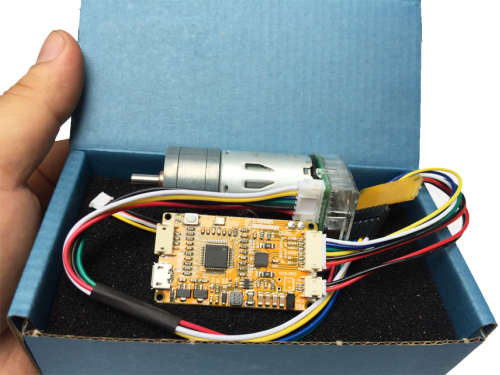
- Combo bao gồm một động cơ Dc Servo và một Dc Servo MSD_E3A đã được cấu hình tương thích cùng nhau. Người dùng có thể sử dụng tín hiệu Pulse/Dir để điều khiển trực tiếp mà không cần cấu hình gì thêm.
- Hỗ trợ đầy đủ các tính năng sẵn có của bộ servo Msd_e3a: Giao tiếp bằng xung/chiều, Uart, Com Ảo. Bảo vệ quá tải, quá dòng, quá nhiệt. Phat hiện encoder hư, động cơ hư...
- Có thể sử dụng điều khiển vị trí, vận tốc và gia tốc.
- Combo phù hợp cho những ứng dụng vừa và nhỏ, cần điều khiển góc (vị trí) hoặc điều khiện tốc độ của một cơ cấu chấp hành, robot nào đó.
- Có phần mềm hỗ trợ, tích hợp nhiều phương pháp điều khiển trực quan khác nhau, với các thông số PID có thể điều chỉnh được. Giúp người dùng có thể dễ dàng hiểu, kiểm tra chất lượng của bộ điều khiển ngay lập tức.
- Với một driver bạn có thể sử dụng để điều khiển được 1 động cơ.
- Ở chế độ ngõ vào tín hiệu từ UART, driver có thể kết nối nhiều driver lại cùng nhau như một mạng các driver với địa chỉ xác đinh. Giúp cho board chủ (Master) có thể điều khiển (gửi các tham số xuống) được nhiều driver MSD (Slave) cùng lúc trên 1 đường UART.
- Cũng trong chế độ UART, người dùng có thể đọc trực tiếp các thông số vị trí hiện tại, vận tốc hiện tại, dòng điện hiện tại. Cũng như các mã lỗi nếu có từ một driver slave.
- Ở chế độ ngõ vào điều khiển Xung/Chiều (Pulse/Dir): Cứ 1 tín hiệu xung đẩy vào chân Pulse của driver, Nó sẽ quay một góc tương ứng với xung đó theo chiều được xác định bằng chân Dir (mức Logic chân Dir 1: chiều thuận hoặc 0: chiều nghịch)
- Trong chế độ điều khiển vận tốc, chúng ta có thể sử dụng một biến trở mắc trực tiếp vào chân Analog của driver để điều khiển tốc độ của động cơ mà không cần thêm bất cứ thành phần nào khác.
- Driver cũng có thể cấu hình như một mạch cầu H nhận tín hiệu điều khiển qua UART với các tính năng bảo vệ quá tải, quá nhiệt và ngắn mạch.
- Driver có 1 cổng USB, cổng này sẽ xuất hiện như 1 cổng COM ảo (Virtual Com) nếu không thể kết nối được với phần mềm DcTuringPro sau khi Driver khởi động 15s. Giúp người dùng có thể dễ dàng dùng bất cứ phần mềm nào hỗ trợ Serial để giao tiếp với driver.
- Mặc dù driver rất nhỏ gọn nhưng tích hợp đầy đủ các tính năng của một Dc Servo Driver công nghiệp rất phù hợp cho những ứng dụng robot, máy tự động nhỏ, đơn lẻ và cần giá thành cực thấp.
Ứng Dụng:
- Tìm hiểu sâu hơn về phương pháp điều khiển vòng kín.
- Ứng dụng trong giảng dạy, nghiên cứu.
- Robot, CNC.
- Nghiên cứu và chế tạo ra các máy móc tự động với độ chính xác cao.
Demo:
1. Licenses ID:
Sử dụng key này HDHGILBOHFIEGDGN cho phần mềm DcTunerPro
2. Setting process: (6 bước để cài đặt và cấu hình)
- Kết nối động cơ -> Kết nối Encoder -> kết nối nguồn vào driver.
- Khai báo Encoder -> Save lại* -> Reset* (*: Không cần khi cấu hình bằng nút nhấn)
- Turning động cơ (Bước này sẽ làm driver tự dò tìm thông số động cơ)
- Chọn mode điều khiển: vị trí hay tốc độ.
- Chọn phương pháp điều khiển: Pulse/Dir, Uart...
- Save lại ->Reset.
3. Connection:

4. Mechanical Specification (unit: mm)
.jpg)
5. Pulse/Dir Communication: (Nhận tín hiệu điều khiển xung/chiều từ bên ngoài)
6. Serial/Uart Communication:
Uart Command List: ( Phương thức giao tiếp: UART/USB-UART (Vituar Com))
Chú ý: Mỗi lệnh cần kết thúc bởi ký tực xuống dòng " "
N0 ? : List Devices: Liệt kê tất cả các driver đang hoạt động trên UART-Network
Nxx ? : Help Command (địa chỉ xx!=0); Hiển thị thông số và tập lệnh hỗ trợ của driver xx.
Nx $xxx= Parameter_Value : Parameter Setting Group;
$001=20; Địa chỉ của driver
$002=200; Encoder Line (Độ phân giải Encoder Hoặc Số xung của đĩa Encoder )
$003=400; Sỗ xung từ bên ngoài cấp vào trong mode Pulse/Dir để động cơ quay được 1 vòng.
$004=004; Bộ điều khiển (0: Turning, 1: None, 2: PID Position, 3: PI Velocity (recommend), 4: Smart Position (recommend), 5: None, 6: H-Bridge mode (Working as H-Bridge))
$005=000; Tín hiệu điều khiển (0: PULSE/DIR, 1: UART Network, 2: None, 3: Analog (Just for velocity Mode))
$006=2000 (mA); Dòng điện giới hạn cho động cơ
$007= 12; Follow Error (rad(PositionModel) or rad/s(VelocityModel)): Ngưỡng sai số cho phép
$008=001; Bật hoặc tắt chế độ bảo vệ (0: Tắt, 1: Bật)
$009=115200; Uart Baudrate
$010=002; Số vòng quay mong muốn khi nhấn nút Test (vòng)
$011= 60; Vận tốc động cơ khi nhấn nút Test (Round/s)
$012=500; Gia tốc động cơ khi nhấn nút Test (Round/s2)
$020=4870; Kp_P=4870 (Khâu tỉ lệ)
$021=0; Ki_P=0
$022=69; Kd_P=69
$023=33; Kp_V=33
$024=1144; Ki_V=1144
$025=0; Kd_V=0
$026=0; Kp_I=0
$027=0; Ki_I=0
$028=0; Kd_I=0
$101=0; MCU(0: Runing, 1: Saving & Reset; 2: Reset; 3: Factory Reset & Reset;)
Nx [p/P value] [v value] [a value] : Lệnh di chuyển Nx với thông số p/P,v,a
Nx: x Địa chỉ của driver (0: Broadcast ; 1->99: Unicast)
p: Vị trí tuyệt đối mong muốn (Option)
P: Vị trí tương đối mong muốn(Option)
v: Vận tốc mong muốn(Option)
a: Gia tốc mong muốn (Option)
Vd: (Driver 1 quay đến vị trí 100rad với vận tốc 50rad/s và gia tốc 600rad/s2): N1 p100 v50 a600
Nx [d value] : Độ rộng xung trong chế độ H-Bridge ($004 = 6); (giá trị: -900 to 900)
Chúy ý: dấu âm "-" động cơ quay ngịch. Dấu "+" động cơ quay thuận.
Nx O [Kx] [T] [Mx] [Dx] [S] [L] [U] [r] [R101] [Gx] [C] ; (O: Operation Group Command)
[ ] : Tham số bên trong có thể có hoặc không có, Có thể kết hợp nhiều lệnh trong 1 gửi.
Kx : Trả ACK hoặc không (K1: Enable (default at start up MCU); K0: Disable
T: Dò tìm thông số động cơ (vd: N2 O T )
Mx: Bộ điều khiển (M3: PI Velocity, M4: Smart Position, M5: None, M6: H-Bridge mode (Working as H-Bridge))
Dx: Giao thức điều khiển (D0: PULSE/DIR, D1: UART Network, D2: None, D3: Analog (Just for velocity Mode))
S: Lưu lại giá trị đã cài đặt (vd: N2 O S )
L: Dừng động cơ ngay lập tức.
U: Mở lại động cơ.
r: Reset vị trí hiện tại về 0
R101: Khởi động lại Driver
C: Xóa Lỗi
G: Đọc các thông số di chuyển của driver (G1: Đọc 1 lần; G3: Đọc Liên tục cho tới khi nhận được bất kì lệnh mới nào khác, Driver sẽ gửi giá trị với tần số 5Hz; G255: Đọc 1 lần với thời gian trả về ngẫu nhiên)
7. Error Codes:
E1: Follow error (Sai số quá lớn giữa vị trí ước lượng và vị trí hiện tại).
E2: Kết nối Encoder A hoặc B bị ngược (Đổi lại Encoder A<->B hoặc đổi lại 2 dây động cơ cho nhau)
E3: Không có tín hiệu encoder hoặc động cơ bị kẹt.
E4: Dây động cơ lỏng hoặc chưa kết nối động cơ.
E5: Quá dòng
E6: Điện áp ngoài ngưỡng hoạt động.
E7: Dò tìm thông số động cơ thất bại (Thường do Encoder độ phân giải kém, hoặc nhiễu Encoder)
E8: Quá nhiệt.
8. Install Software & Driver: (Sử dùng phần mềm DcTurnPro để cài đặt)
- Cài Đặt Driver từ file .INF theo hướng dẫn sau:
- Khăc phục lỗi "The third-party INF does not contain digital signature information" ở window 8 trở lên:
- Cài đặt phần mềm DcTunerPro.
Các sản phẩm khác

Điện Áp Làm Việc: 8-28VDC
Số Xung Encoder :400 [PPR]
Công Xuất Động Cơ Max: 60W
Số lượng: 4

Điện Áp Làm Việc: 8-28VDC
Số Xung Encoder :400 [PPR]
Công Xuất Động Cơ Max: 80W
Số lượng: 0

Điện Áp Làm Việc: 8-28VDC
Số Xung Encoder :200 [PPR]
Công Xuất Động Cơ Max: 40W
Số lượng: 19
Điện Áp Làm Việc: 6-28VDC
Số Xung Encoder :360[P/R]
Công Xuất Động Cơ Max: 10W
Số lượng: 38